Introduction

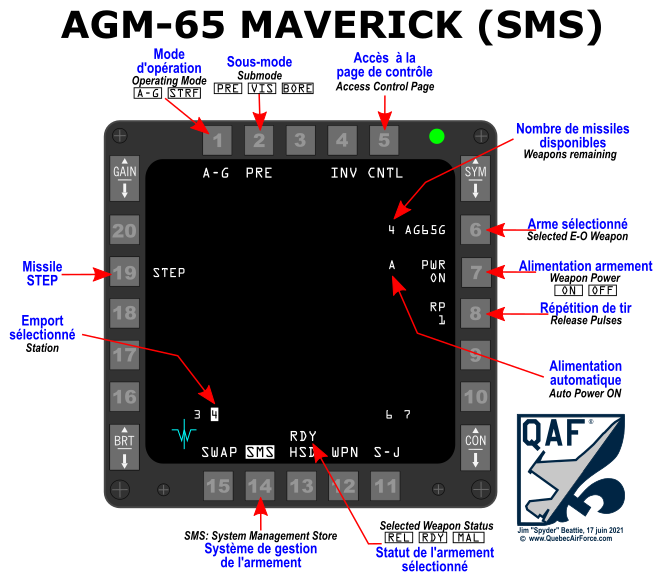
Le missile Maverick AGM-65G :
- Couleur: Gris.
- Rail de lancement: LAU-117 (rampe de lancement monoplace).
- Distance: 20nm.
- Genre de cible: large structure.
- Mode de ciblage possible: Radar handoff, TGP handoff, Vis (HUD).
- Quatre capteurs (Sensors Of Interest or SOI): Radar (FCR), Targeting POD (TGP), HUD (mode VIS) et WPN.

Il y a quatre étapes principales à effectuer pour utiliser efficacement le Maverick AGM-65D ou AGM-65G en mode électro-optique «PRE». Il existe également les sous-modes «BORE» et «VIS». Nous allons survoler les modes PRE et VIS plus en détails puisqu'ils permettent de couvrir les principaux mécanismes. Nous allons décrire chacune des étapes regroupées à l'aide d'onglets situés en haut de cette page, afin de bien discerner chacune de ces étapes.

Ci-dessus, une carte de référence rapide du 101e ECV des étapes ACTIVATION, BORESIGHT, HANDOFF et LAUNCH des missiles AGM-65D ou G Maverick.
Cliquez l'illustration pour obtenir le document PDF pour impression.
Quelques informations générales sur le missile Maverick
Le missile Maverick nécessite un délai de trois (3) minutes avant que la vitesse de rotation du gyroscope soit optimale et le missile ne peut pas être utilisé pendant ce temps.
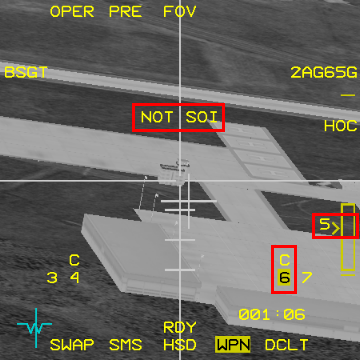
Sur le MFD en mode Air-Sol, la page WPN du AG65G affichera "NOT TIMED OUT" pendant le cycle de préparation. Lorsque ce message s'effacera, le missile sera prêt à être utilisé.
La batterie d'alimentation du Maverick a une durée maximale de soixante (60) minutes lorsque la caméra WPN n'est pas utilisée (Video OFF) et seulement trente (30) minutes avec la caméra vidéo activée.
Quickref Le Maverick peut-être configuré pour s'activer (Power ON) de manière automatique en précisant une direction cardinale (N, S, E, W) à partir d'un waypoint spécifique (Voir la fonction CNTL sur la page WPN du Maverick.)
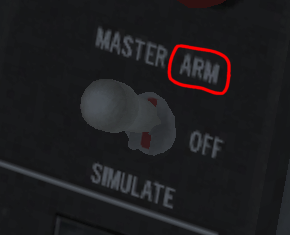
Le missile AGM-65G n'a pas de couvercle de protection (cover dome) devant sa caméra et n'a donc pas besoin d'un «UNCAGE» (U) pour activer la caméra vidéo du Maverick. L'image vidéo sera affichée immédiatement lorsque que le gyro du missile aura atteint sa vitesse de rotation optimale (PWR ON) à la condition que le commutateur «MASTER ARM» soit à la position «ARM» ou «SIMULATE».
La caméra vidéo sera inactive uniquement lorsque le missile est à POWER OFF, ou lorsque le commutateur «MASTER ARM» est à la position SAFE.
Dès qu'un emport comporte plus d'un missile Maverick, un dôme de couverture (Cover Dome) est présent sur la lentille de la caméra afin de protéger celle-ci de la poussière libérée et les débris des autres missiles lors du lancement.
La fonction «UNCAGE» permet de faire «sauter» le couvert de protection du missile. Ce dôme de protection n'est jamais utilisé sur un AGM-65G Maverick puisque celui-ci utilise une rampe de lancement (rail) monoplace LAU.
L'utilisation du «Targeting Pod» comme capteur (SOI) est très efficace avec les missiles Mavericks pour ces deux raisons; 1) La caméra du TGP est beaucoup plus puissante et précise que celle du Maverick. 2) Le TGP est un capteur qui peut transmettre la positions de plusieurs cibles à plusieurs missiles Maverick bien avant que la zone de lancement dynamique du Maverick soit atteinte. Par la suite, on peut donc effectuer des tirs de plusieurs missiles Maverick en rafale sans devoir se préoccuper de désigner chaque cible individuellement entre chaque tir. Tirer et oublier (Fire and Forget) est un atout indéniable en zone chaude et le TGP permet les tirs en rafale.
Seuls les missiles AGM-65D et AGM-65G peuvent-être utilisés avec le HUD, le TGP, le FCR ou WPN, tandis que les misssiles AGM-65A et B doivent-être lancés obligatoirement à partir de la page «WPN».
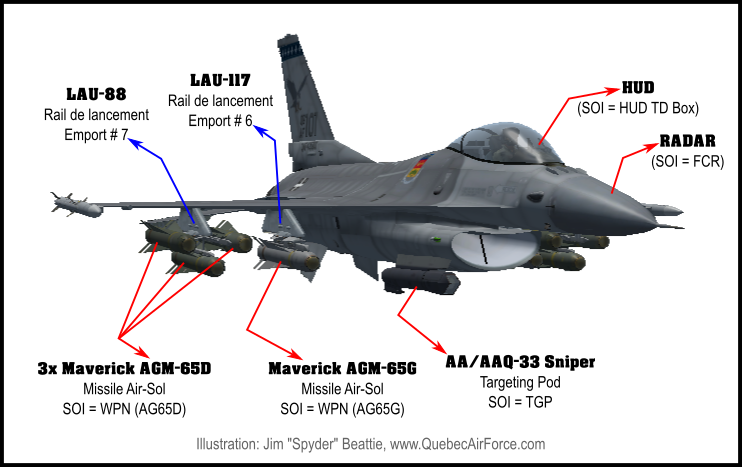
Les quatre emports #3, 4, 6, et 7 du F-16C qui peuvent-être utilisés avec les missiles AGM-65D/G Maverick

Les capteurs possibles pour utiliser le Maverick AGM-65D ou G:
L'illustration ci-dessus montre les différentes composantes qui seront abordés dans cette section.
- HUD = Vue tête haute (Head-Up Display);
- TGP = Targeting Pod via le MFD de gauche;
- FCR = Fire Controle RADAR via le MFD de gauche;
- WPN = Weapon = Missile Maverick via le MFD de droite;
Un «TARGETING POD» facilite le repérage des cibles et permet le transfert des données de localisation (track) des cibles vers le missile Maverick AGM-65D ou G:

Le «Targeting POD» (AN/AAQ-14) ou le «Sniper Pod» (AN/AAQ-33) peuvent-être utilisés comme capteurs (Sensors) pour le Missile Maverick AGM-65G.
Téléchargement de la mission
101_MAVERICK_TR_2P en format ZIP
![]() Fichier: 101_MAVERICK_TR_2P
Cette mission est compatible avec le simulateur Falcon BMS 4.35 U1.
Fichier: 101_MAVERICK_TR_2P
Cette mission est compatible avec le simulateur Falcon BMS 4.35 U1.
Vous pourrez télécharger les quatre (4) fichiers qui correspondent à cette rubrique en cliquant sur le pictogramme ZIP.
101_MAVERICK_TR_2P.iff
101_MAVERICK_TR_2P.ini
101_MAVERICK_TR_2P.tac
101_MAVERICK_TR_2P.twx
Décompressez ou déposez (copier) ces fichiers dans votre dossier [C]:\Falcon BMS 4.35\Data\Campaign\
Théâtre Korea (KTO)

Maintenant que les informations générales concernant le Maverick et les différents capteurs sont connues, consultons les étapes plus en détail via les onglets présentés en haut de cette page.
Activation des systèmes
1.01 | MASTER MODE | Air-Ground
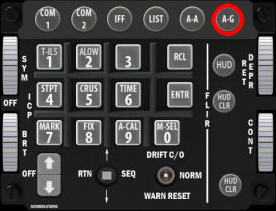
Activez le mode «Air-Sol» via le bouton A-G situé au coin supérieur droit de l'ICP.
1.02 | MASTER ARM | SIMULATE
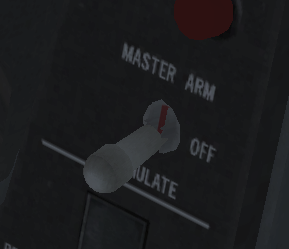
Par mesure de précautions et afin d'éviter un tir fratricide, placez le commutateur MASTER ARM à SIMULATE car le missile Maverick est toujours prêt au tir (Hot) et il pourraît être lancé par inadvertance lors des procédures initiales d'alignement.
Le mode SIM vous permettra d'effectuer l'alignement ainsi que toutes les procédures initiales requises, à l'exception du tir du missile. On pourra passer en mode MASTER ARM: ARM quelques minutes avant la procédure de lancement des missiles.
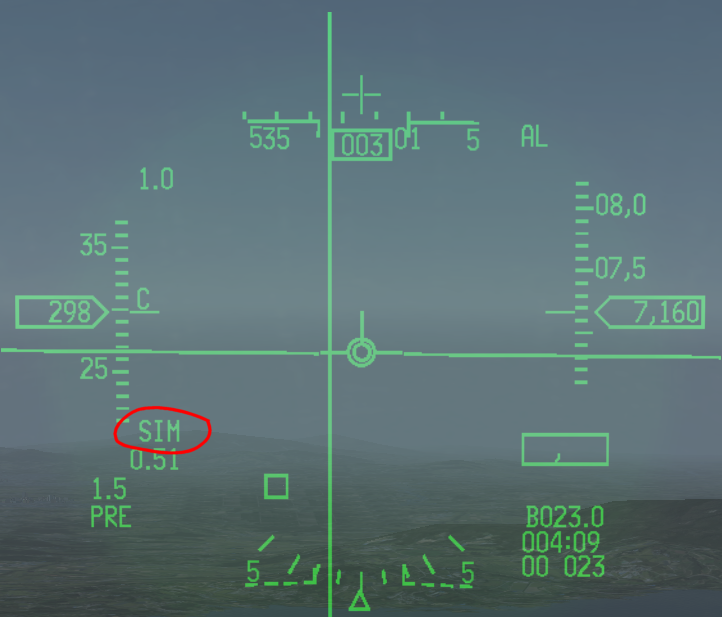
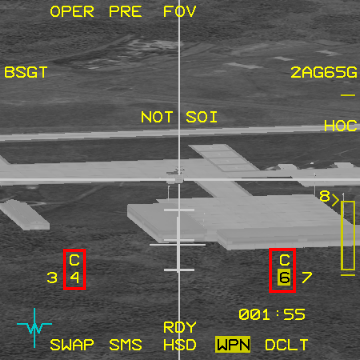
Lorsque le mode SIMULATE est activé, on peut voir l'étiquette SIM dans le coin inférieur gauche du HUD.
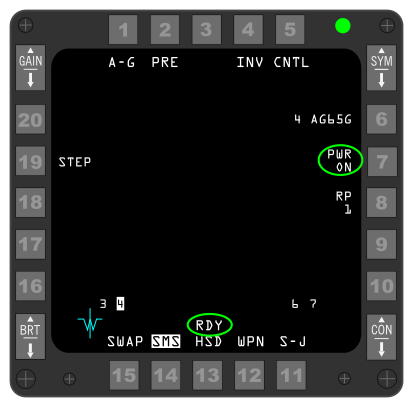
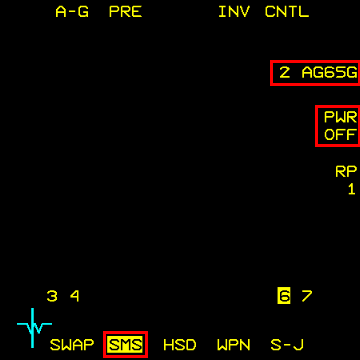
1.03 | SMS | Power ON
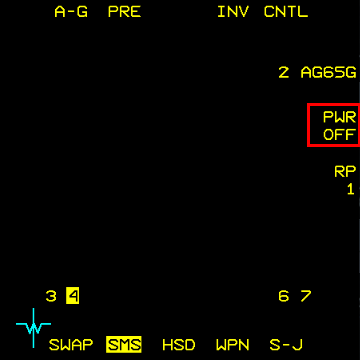
Sur la page SMS, activez le PWR ON. Cette procédure alimente en électricité toutes les armes Air-Sol présentes sur vos emports.
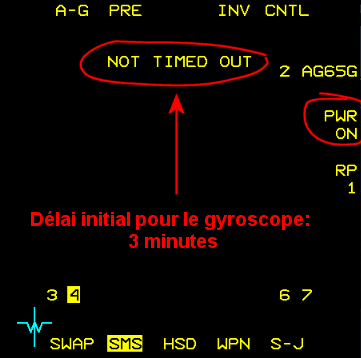
Il faudra trois (3) minutes pour que les gyro atteignent leur pleine vitesse de rotation et que vos missiles AGM-65G Maverick soient prêts à utiliser.
Pendant cette période d'attente, le message «NOT TIMED OUT» sera affiché à la page du SMS et l'image sur la caméra du Maverick ne pourra pas être visible.
1.04 | Targeting Pod | Air-Ground
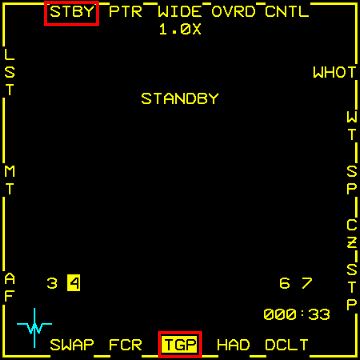
Sur le MFD gauche de la page TGP, Le «Targeting Pod» est en mode «STAND BY».
Cliquez l'OSB#1 (STBY) pour afficher la page de gestion du Targeting POD.
Le TGP indique l'état STBY (affiché en vidéo inverse sur l'OSB #10).
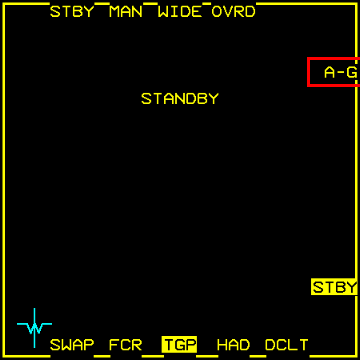
Cliquez sur l'OSB#6 (A-G) du TGP pour activer le Targeting POD en mode Air-Ground afin de voir l'image de la caméra du TGP.
1.05 | Targeting Pod | Caméra active
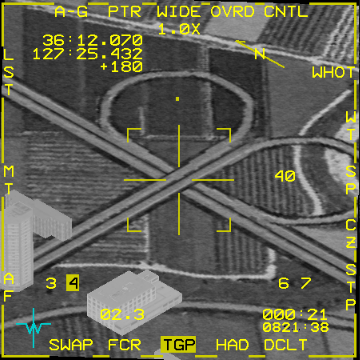
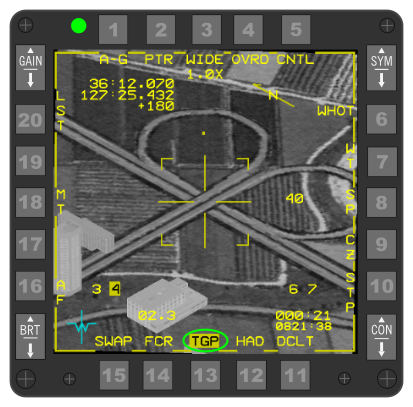
La puissante caméra du «Targeting Pod» (TGP) s'affiche et l'image correspond sans doute à la position du steerpoint.
Note: Si vous préférez avoir votre caméra déjà positionnée sur un objet au sol, il faut préalablement effectuer un verrouillage d'une cible à l'aide du FCR (RADAR)...
Notez que le contour du MFD du TGP affiche un carré jaune, signifiant que le TGP est actuellement votre capteur actif (SOI - Sensor Of Interest).
Si un libellé de l'écran du TGP indique NOT SOI, utilisez le bouton DMS Down de votre flight stick pour alterner le capteur (SOI) d'un MFD à l'autre.
Les systèmes TGP et SMS sont maintenant fonctionnels
Les principales étapes pour activer les systèmes TGP et SMS sont maintenant complétées.
Vous pouvez maintenant passer à l'étape #2 de l'onglet situé en haut de la page, qui vous permettra d'effectuer les correctifs de corrélation des axes de visée de tir entre la caméra du TGP et ceux des missiles (WPN).
La prochaine étape est appelée «Boresighting» qui signifie en gros «Alignement».
Alignement / Boresight
2.01 | Procédure Boresight


«Boresighting» est une procédure que signifie «Alignement» ou «Couplage des axes de visé de tir».
Lorsque les techniciens en armement installent un missile Maverick sur un rail de lancement (emport) sous l'aile d'un avions F-16, ainsi qu'un Targeting Pod, on doit savoir que ces deux systèmes ne sont pas parfaitement alignés l'un envers l'autre. Ils n'ont pas le même axe de visée de tir.
Cette différence de quelques degrés fait une différence majeure entre la vue des caméras sur une grande distance de 20nm. Si les caméras vidéo du Maverick et du Targeting Pod on une différence de visée de tir, il sera impossible d'effectuer un tir précis vers une cible.
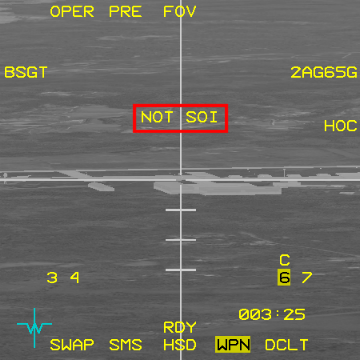
Le pilote doit donc calibrer ou établir une corrélation entre ces deux systèmes (TGP et WPN-Maverick) en introduisant un correctif d'angle de visé de tir (BSGT). Cet ajustement doit-être effectué le plus tôt possible pour chacun des emports (rails de lancement) qui utilisent un missile Maverick AGM-65D ou G.
L'alignement (BSGT) s'effectue uniquement pour corriger ce différentiel de l'axe de visée de tir induit entre le rail de lancement (emport) et le Targeting Pod.
Si nous avons un emport LAU-88A/A contenant trois (3) missiles AGM-65D, il n'y aurait qu'un seul emport à aligner avec le Pod.
En résumé, sur le F-16, il y a un maximum absolu de quatres (4) emports à aligner (emport #3, #4, #6 et #7) si ceux-ci sont tous chargés avec des missiles Mavericks.
Sachez aussi que la procédure d'alignement (Boresighting) n'est pas obligatoire, vous pourriez uniquement utiliser la caméra du Maverick pour effectuer un tir vers une cible. Cependant le couplage entre le TGP et le Maverick vous assure d'obtenir une meilleur précision entre le capteur (SOI) utilisé et l'axe de visée de tir du Maverick (LOS).
La procédure Boresight est fortement suggérée si vous souhaitez utiliser le Targeting Pod (TGP) comme capteur principal de désignation d'une cible en corrélation avec la transmission des données du tracking vers un missile Maverick.
Il est également très important de comprendre que lorsque la procédure Boresight est complétée sur tous les emports et qu'on désire utiliser le TGP par la suite, on ne doit plus jamais utiliser le Maverick (WPN) comme capteur (SOI) pour désigner une cible. On ne doit plus jamais cliquer l'OSB#20 «BSGT» non plus car tout le travail concernant l'acquisition de vos cibles (TMS-Up/Lock-on target) devra exclusivement être effectué à l'aide du Targeting Pod (TGP) et non pas via le missile Maverick.
En fait, une fois l'alignement complété sur vos emports, la caméra du missile Maverick servira UNIQUEMENT pour valider VISUELLEMENT la corrélation entre le TGP et votre missile, mais ce sera seulement le TGP qui devra servir pour désigner une ou plusieurs des cibles par la suite.
Après le boresighting, si vous utilisez à nouveau le capteur du Maverick (WPN) pour effectuer un verrouillage, vous allez compromettre toute la procédure d'alignement (BSGT) que vous aurez effectuée initialement et votre missile ira droit au sol sans atteindre sa cible.
Donc, l'OSB #20 du MFD du WPN du Maverick intitulé «BSGT» ainsi que la fonction TMS Up ne devront plus jamais être utilisés une fois que votre phase d'alignement des axes de visée de tir sera complétée. En fait, pour assurer le succès de votre lancement de missile, n'utilisez jamais plus le capteur situé dans le MFD Weapon (WPN - Caméra du Maverick) pour ne pas dérégler vos correctifs d'alignements.
2.02a | Boresight | TGP | Description des fonctions

2.02b | Boresight | TGP | Situational awareness
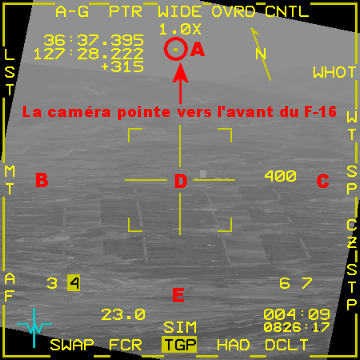
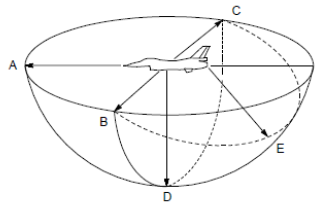
Pour savoir où pointe la caméra du TGP, il existe cinq (5) points de référence situationnelle illustrés dans la page WPN du TGP. On peut ainsi savoir si notre caméra «regarde» une cible située vers l'avant de notre F-16 ou ailleurs.
2.03 | Boresight | TGP | Trouver des cibles quelconques au sol
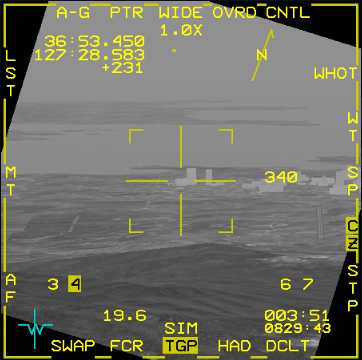
On amorce la procédure BORESIGHT. Cette procédure sera exécutée une seule fois pour chacun des emports.
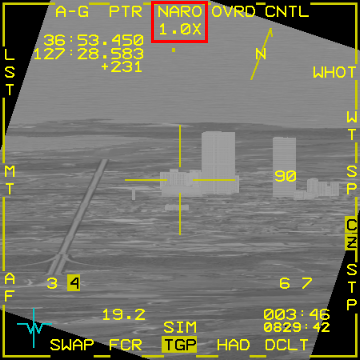
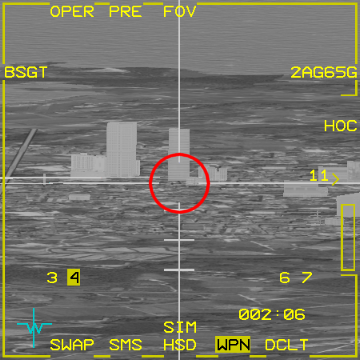
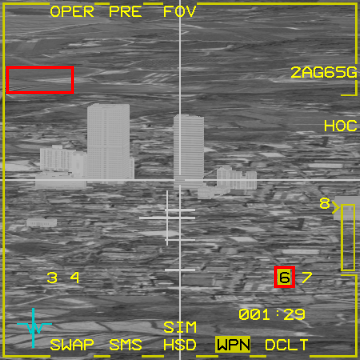
À l'aide de la caméra du TGP, on cherche un bâtiment de référence facile à identifier afin d'amorcer la procédure d'alignement.
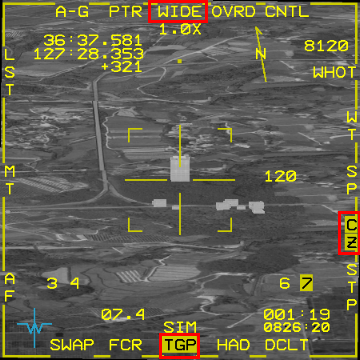
Sur cette illustration, le pilote a trouvé une ville ayant plusieurs bâtiments. Il doit maintenant repérer un bâtiment facile à identifier. Il a environs un peu moins de 4 minutes avant de survoler la ville (3min, 51sec) et pour compléter sa procédure BORESIGHT.
La visibilité de la cible est cependant faible à cette distance, car la cible est encore très loin. Heureusement le TGP possède deux fontions permettant d'effectuer un «zoom» afin de clarifier l'image.
2.04 | Boresight | TGP | Améliorer la visibilité de la caméra du TGP
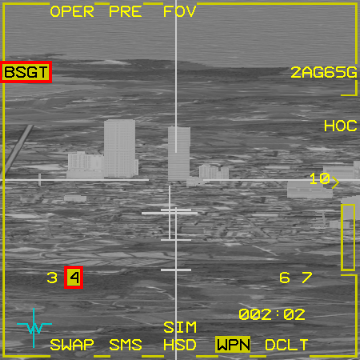
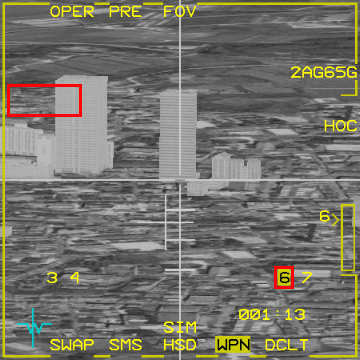
Pour voir plus près notre bâtiment de référence, le pilote peut utiliser l'OSB#3 du TGP afin de passer du mode «WIDE» au mode «NARO».
De plus, on peut modifier le «Brightness (BRT)» du MFD concerné pour assombrir l'image au besoin.
On peut également modifier la polarité «WHOT» (White On Cold) pour «BHOT» (Black on White) via l'OSB#6 du TGP.
2.05 | Boresight | TGP | Range Knob
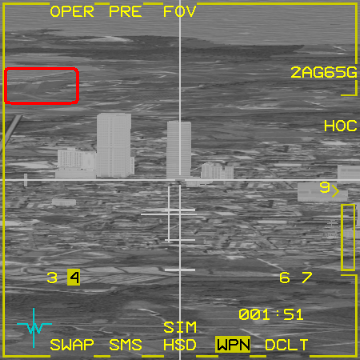
En plus du mode «NARO», on peut également utiliser le bouton MAN RANGE KNOB du Throttle, ou via le clavier avec les touches Alt-F3 et Alt-F4.
On peut ainsi zoomer de 1.0x à 4.0x à l'aide de cette fonction d'agrandissement de l'image de la caméra du TGP.
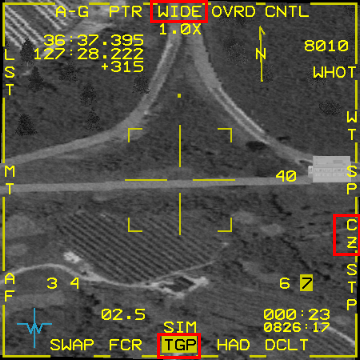
2.06 | Boresight | TGP | Sélectionner une cible de référence
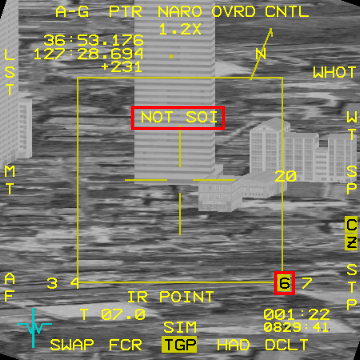
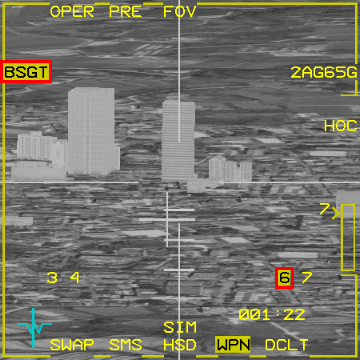
Une cible de référence n'est pas notre cible finale. C'est uniquement un bâtiment quelconque qui sera utilisé pour calibrer nos deux caméras. Cette procédure d'alignement «Boresight» est donc exécutée bien avant votre attaque au sol.
Sur cette illustration, le pilote a finalement choisi un bâtiment facilement identifiable. Il est l'un des plus haut du secteur. Ce sera donc plus facile à identifier par la suite avec la prochaine étape concernant l'alignement avec la caméra du Maverick.
Lorsque la cible est bien en vue, on effectue d'abord un verrouillage de celle-ci via le TGP à l'aide du bouton
Une fois la cible de référence verrouillée sur le TGP, on remarque qu'un carré solide est ajouté autour de la croix de tir (cross-hair). Ceci indique qu'une cible est verrouillée adéquatement au TGP.
On ne doit plus toucher au curseur (SPI) de la page TGP lorsque l'OSB#9 indique «CZ» en vidéo inversé et que votre cible de référence est déjà verrouillée au TGP.
2.07 | Boresight | TGP | WPN
On doit maintenant changer de capteur pour passer au MFD de droite, celui du WPN. Par conséquent, notre arme AGM-65G Maverick est sélectionné ici sur l'emport #4 sur la page WPN.
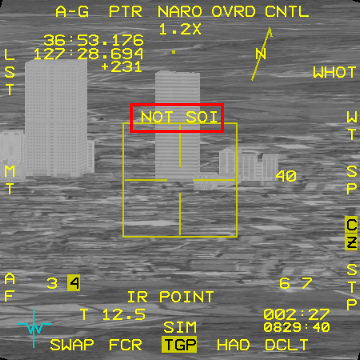
Le capteur actif étant maintenant notre Maverick de l'emport #4, on peut voir que la page MFD du TGP indique maintenant NOT SOI, puisque c'est maintenant via le WPN que nous allons déplacer le curseur SPI afin de repérer le même bâtiment de référence.
On remarque aussi qu'il existe actuellement une différence entre la position où pointe la caméra du TGP et celle du Maverick. Les deux images ne pointent pas du tout au même endroit. C'est justement ce qu'il nous faut corriger pour l'emport #4 et ainsi de suite pour tous les emports existants de la page WPN.
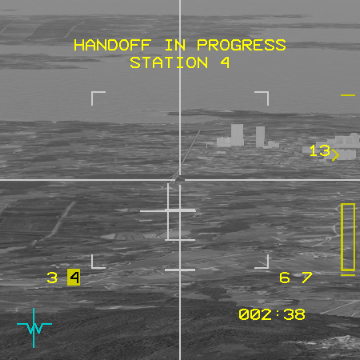
La caméra du Maverick reçoit un message du système TGP lui indiquant qu'une procédure HANDOFF est amorcée sur l'emport #4 via le message «HANDOFF IN PROGRESS STATION 4».
2.08 | Boresight | WPN | Ajustement caméra emport 4
La page du WPN possède maintenant un contour jaune signifiant que c'est notre capteur actif (SOI - Sensor Of Interest).
On doit maintenant se servir du curseur (SPI) de la page WPN pour déplacer la caméra du Maverick afin de sélectionner le même bâtiment de référence déjà verrouillé à la caméra du TGP.
2.09 | Boresight | WPN | BSGT emport 4
Le pilote utilise maintenant le bouton «TMS Up» du flightstick afin de verrouillé la même cible de référence via la page WPN, pour l'emport #4.
Une fois que la cible de référence est bien verrouillé, le pilote doit utiliser l'OSB#20 (BSGT) du MFD de la page WPN. Important: Cette procédure «BSGT» sera effectuée une seule fois pour l'emport #4 pendant toute la mission car cet emport est maintenant aligné avec l'axe de tir du TGP.
2.10 | Boresight | WPN | BSGT complété emport 4
Le «Boresighting» ayant été effectué sur l'emport #4, on peut remarqué que le libellé de l'OSB#20 (BSGT) a disparu.
2.11 | Boresight | WPN | MSL STEP
On amorce maintenant la même procédure d'alignement (Boresighting) sur l'emport #6. On conserve le SOI sur le MFD du WPN car notre cible de référence est déjà bien identifiée au TGP. Il est donc inutile de changer de capteur.
Pour changer d'emport, le pilote utilise le bouton MSL STEP du flightstick.
L'OSB#20 n'affiche pas le libellé «BSGT», car on a pas encore effectuer de verrouillage sur la cible de référence pour cet emport #6.
2.12 | Boresight | WPN | Ajustement caméra emport 6
On doit maintenant se servir à nouveau du curseur (SPI) de la page WPN pour déplacer la caméra du Maverick de l'emport #6 afin de sélectionner le même bâtiment de référence déjà verrouillé à la caméra du TGP lors de la procédure 2.12.
2.13 | Boresight | WPN | BSGT emport 6
Le pilote utilise maintenant le bouton «TMS Up» du flight stick afin de verrouillé la même cible de référence via la page WPN, pour l'emport #6.
Une fois que la cible de référence est bien verrouillé sur la page WPN, le pilote doit utiliser l'OSB#20 (BSGT) du MFD de la page WPN. Important: Cette procédure «BSGT» sera effectuéee une seule fois pour l'emport #6 pendant toute la mission car cet emport est maintenant aligné avec l'axe de tir du TGP.
2.14 | Boresight | WPN | BSGT complété emport 6
Le «Boresighting» ayant été effectué sur l'emport #6, on peut remarqué que le libellé de l'OSB#20 (BSGT) a disparu.
Vous pouvez effectuer la même procédure «Boresighting» pour chacun des autres emports #3 et #7 en suivant les mêmes étapes 2.08 à 2.14.
Si le genre de missile Maverick est différent (par exemple AGM-65D), utilisez le SMS pour changer d'emport.
Vous pouvez toujours conserver le même bâtiment de référence déjà verrouillé au TGP à l'étape 2.12. Donc inutile de réutiliser à nouveau le capteur du TGP.
Il est très important d'effectuer l'alignement de tous vos emports avant de vous servir des missiles Maverick. La procédure «Boresight» doit s'effectuer le plus tôt possible au début de la mission car nous ne reviendrons pas sur cette procédure par la suite.
2.15 | CANCEL ALL TRACKS
Une dernière étape importante avant de conclure votre procédure Boresight est de réinitialiser les senseurs SPI car on a induit un différentiel (offset) en effectuant la procédure BORESIGHT. On doit maintenant corriger ou réinitialiser ce différentiel sinon tous nos steerpoints auront eux aussi un différentiel de positionnement.
La façon la plus rapide pour corriger ce différentiel des SPI est de passer en mode «MSL Override. Changez le MASTER MODE de A-G à A-A est la façon la plus rapide d'annuler tous les tracks offsets.
2.16 | Boresight | SMS | PWR OFF
Afin de conserver la charge sur vos batteries des missiles Maverick, on ferme l'alimentation de ceux-ci en cliquant l'OSB#7 (PWR OFF) de la page SMS.
Ainsi plus tard, au steerpoint «IP (Ingress point)», on réactivera le «POWER ON» du SMS des Maverick juste avant la procédure de verrouillage des deux cibles réelles pour notre attaque au sol.
N'oubliez pas que le temps d'utilisation maximum de 30 minutes (avec la caméra du Maverick allumée) est cumulatif tout au long de votre mission. Ménagez vos batteries, maintenant que tout est aligné!
2.17 | Boresight | TGP | CANCEL ALL SLEW | Cursor Zero
Nous avions déplacé le curseur du TGP (SPI) et effectué un verrouillage (TMS Up) tantôt, lors de procédure d'alignement (Boresight). Ceci a induit une variation (offset) dans le curseur SPI. On doit maintenant rectifier cette variation de position sans quoi, tous nos Steerpoints et tout nos autres systèmes utilisants un SPI auront également cette différence de positionnement (offset).
On doit donc corriger cette différence en effectuant cette procédure:
Sur le TGP, on constate que le libellé «CZ est allumé, signifiant que le curseur SPI du TGP a maintenant un «Offset» qu'on doit réinitialiser.
2.17.1) Effectuez un TMS Down pour déverrouiller la dernière cible.
2.17.2) Assurez-vous que l'OSB#3 est en mode «WIDE FOV.
2.17.3) Cliquez l'OSB #9 CZ afin que ce dernier ne soit plus en vidéo inversé. De plus, notez que la caméra du TGP ira immédiatement pointer vers le steerpoint de navigation actuel.
2.18 | Boresight | TGP | CANCEL ALL SLEW | Vérification
Une fois la procédure 2.17 complétée, le «CZ» devraît être affiché en mode normal sur votre page «TGP» ainsi que sur la page «WPN».
Lorsque les libellés CZ des curseurs TGP et WPN sont inscrits en vidéo normal, ceci signifie qu'il n'y a plus de différence (offset) dans la position des curseurs SPI.
Un variation des curseurs SPI pourraîent vous causer des problèmes de navigation ou de verrouillage FCR ultérieurement. Il est ainsi très important d'effectuer cette procédure de repositionnement à zéro des curseurs SPI.
On peut valider ceci facielement à l'aide du HSD en vérifiant que la croix d'un point de navigation pointe exactement sur le steerpoint sélectionné. S'il y a un «offset» au HSD, il est fort probable que vous ayez des différences dans tous les systèmes utilisant un curseur SPI.
2.19 | Boresight | Résumé final
Il est important de savoir qu'une fois que votre procédure d'alignement (boresighting) est complétée sur chacun de vos emports, on ne doit plus jamais utiliser la page WPN des missiles Maverick pour effectuer quoique ce soit.
En fait la caméra du Maverick servira uniquement pour valider visuellement la corrélation de votre travail avec le Targeting Pod. À partir de maintenant, vous allez travailler uniquement avec le TGP (Targeting Pod).
Si vous ne respectez pas cette directive, votre procédure de lancement d'un missile Maverick sera ineffective et votre missile se dirigera directement au sol sans jamais atteindre votre cible.
À partir de maintenant, on ne clique plus jamais sur l'OSB#20 (BSGT) de la page WPN, puisque cette procédure «BSGT» est TERMINÉE DÉFINITIVEMENT pour le reste de la mission. Alors même si ce libellé «BSGT» devait apparaître à nouveau dans les procédures subséquentes, ne touchez plus jamais au bouton OSB#20 «BSGT» pour le reste de votre mission et tout ira bien.
![]() Maintenant que la procédure BORESIGHTING est complétée, consultez les détails de la prochaine étape HANDOFF, disponible via l'onglet situé en haut de cette page.
Maintenant que la procédure BORESIGHTING est complétée, consultez les détails de la prochaine étape HANDOFF, disponible via l'onglet situé en haut de cette page.
Transfert des données / Hand-off
3.00 | Handoff | Intro
HAND-OFF = TRANSFERT DES DONNÉES DE POSITION DE LA CIBLE
Le HANDOFF est la méthode pour transmettre les données de votre cible obtenues par le «Targeting Pod» vers le missile Maverick AGM-65D ou AGM-65G.
Lorsqu'un HANDOFF est en cours, le message «HANDOFF IN PROGRESS ON STATION #» sera affiché à l'écran du Maverick sur l'emport sélectionné. Une fois le transfert des données complété, sachez que votre missile aura reçu en mémoire la position exacte de longitude/latitude/Altitude de votre cible. La mention «C (Completed)» devrait apparaître lorsque le Maverick aura mémorisé cette position et vous n'aurez pas à lui transmettre un seconde fois, sauf si vous désirez effectuer une simple validation de corrélation entre votre TGP et votre WPN.
3.01 | Handoff | Power ON | Master ARM
Si vous vous préparez pour effectuer le ciblage de votre cible finale, activez le «MASTER ARM» à ARM.
Si parcontre c'est uniquement pour valider visuellement que la corrélation de votre alignement effectuéà la procédure «boresight», entre votre TGP et votre WPN (Maverick), alors demeurez en mode «SIMULATE».
3.02 | Handoff | Chercher votre cible via le TGP | Emport #4

On ne touche plus au «WPN» pendant cette procédure «HANDOFF», alors assurez-vous que le capteur (SOI) soit sur le TGP.
Sélectionnez l'emport de votre choix pour désigner votre première cible. Disons ici l'emport #4.
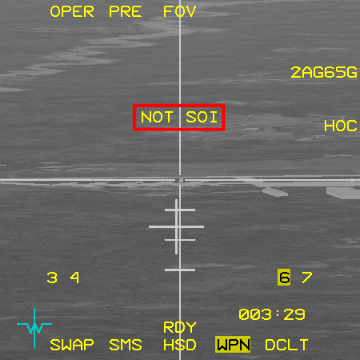
Sur la page WPN, le message «NOT SOI» indique que ce n'est pas le Maverick qui est le capteur, mais bien le TGP. C'est exactement ce qu'on doit faire, soit de travailler maintenant avec le TGP uniquement pour désigner notre cible.
Si le SOI est sur le mauvais capteur, utilisez le bouton «DMS Down» pour changer le SOI d'un MFD à l'autre, comme d'habitude.
Au besoin, vous pouvez à nouveau zoomer la caméra du TGP tel que mentionné dans la procédure Boresight. Idem pour la caméra du Maverick à l'aide de l'OSB#3 (FOV: Field Of View)).
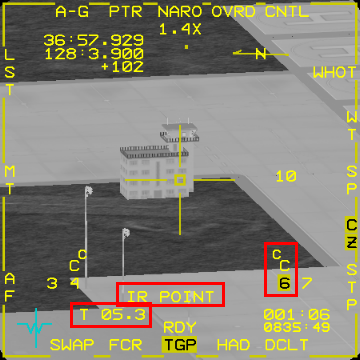
3.03 | Handoff | Transfert des coordonnées de la cible | Emport #4

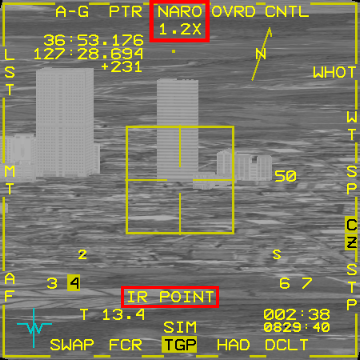
Utilisez le curseur afin de positionner le SPI sur votre première cible réelle, puis utilisez le bouton TMS Up de votre «flight stick» afin de verrouiller cette cible.
Assurez-vous visuellement que le SPI de votre cible au TGP correspond parfaitement à la position du SPI de votre page WPN. Si ce n'est pas le cas, vous avez manquer une étape dans la précédante procédure BORESIGHT.
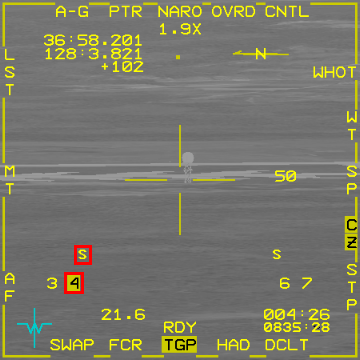
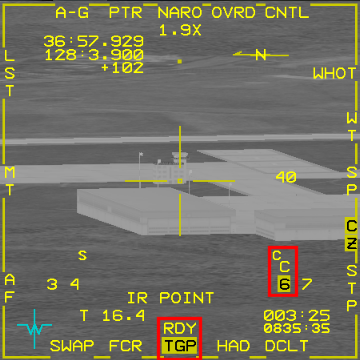
Si tout est visuellement bien aligné et que vos deux caméra sont en diapason, le message «IR POINT» s'affiche sur la page du TGP indiquant le verrouillage, alors que le message «HANDOFF IN PROGRESS STATION 4» apparaît sur la page «WPN». Le «Targeting Pod» envoi les coordonnées de votre cible à votre missile Maverick pour l'emport #4. La cible pour l'emport #4 est maintenant enregistrée à la mémoire du Maverick, on passe au prochain emport.
Note: La première cible dans cet exemple est un RADAR SSR.
3.04 | Handoff | TGP | MSL STEP | Sélectionner Emport #6
Utilisez le bouton MSL STEP de votre «Flight Stick» afin de sélectionner l'emport #6 sur la page «TGP».
Ce dernier devrait être illuminé noir sur jaune au coin inférieur droit de chaque MFD.
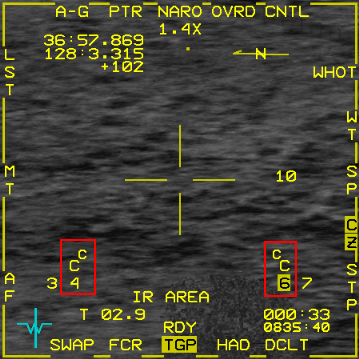
Cherchez visuellement votre seconde cible que vous désirez assigner à votre #6 à l'aide de la caméra du «TGP».
Ici aussi il est possible de zoomer la caméra du TGP pour faciliter la recherche de votre seconde cible.
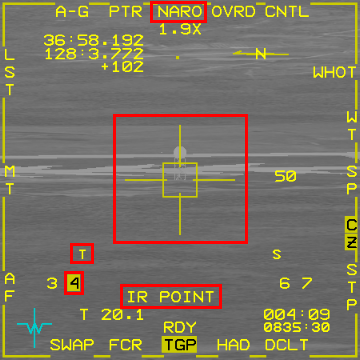
Si tout est visuellement bien aligné et que vos deux caméras sont en diapason pour l'emport #6, alors vous êtes prêt à verrouiller votre seconde cible finale à l'emport #6, sinon votre alignement (boresighting) n'avait pas été effectué correctement à l'étape 2.
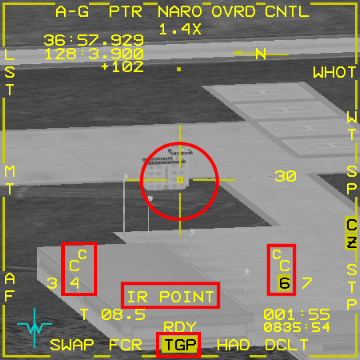
Si le message «IR AREA» s'affiche sur la page du TGP, effectuez à nouveau votre verrouillage afin d'obtenir le message «IR POINT» afin de transférer les coordonnées au missile.
Ce processus de transfert de donnée sera perceptible à l'aide du message «HANDOFF IN PROGRESS STATION 6» qui apparaîtra sur la page «WPN». Ce message n'est pas affiché sur cette illustration.
3.05 | Handoff | Transfert des coordonnées de la cible | Emport #6
Lorsque le «Targeting Pod» a transmis adéquatement les coordonnées de votre seconde cible à votre missile Maverick pour l'emport #6, un libellé «C» pour «COMPLETE» sera affiché au dessus de l'emport #6.
Note: La seconde cible dans cet exemple est un tout de contrôle.
3.06 | Handoff | Transfert complété pour les emports #4 et #6
Lorsque la procédure HANDOFF est complétée, cela signifie que les deux emports #4 et #6 ont obtenus les coordonnées en provenance des verrouillage effectué par le «Targeting Pod».
On peut le constater ici alors que les deux emports (#4 et #6) possède un libellé «C» (Complété) au dessus de chaque emport concerné.
3.07 | Handoff | Validation #1 via le HUD

Lorsque la procédure HANDOFF est complétée, on peut valider que tout est conforme pour nos deux cibles prioritaires à l'aide du HUD.
Sur l'illustration de droite (HUD), on peut distinguer que le «TD Box (Target designator Box)» est déjà positionné sur l'emport ayant la première cible prioritaire. Donc le libellé #1 n'apparaît pas, tandis que le libellé de la seconde cible prioritaire #2 est affichée à gauche dans le HUD.
Sur le MFD du TGP, on peut également savoir que nous sommes à portée de tir pour la cible prioritaire, puisque le caret du «MLE (Missile Launch Enveloppe)» est à moins de 5nm.
Sur l'illustration de gauche (TGP), on peut que le «TD Box» correspond bien à notre tour de contrôle. C'est également ce qu'on peut distinguer dans le HUD également, malgré que la caméra du TGP soit beaucoup plus puissante que nos yeux dans le HUD.
Note: Le «TD Box» est un carré affiché dans le HUD qui désigne la position actuelle de notre curseur («SPI» - Sensor point of Interest). La cible prioritaire #1 est la dernière que nous avons assigné via le HANDOFF. C'est pourquoi notre emport #6 est devenu la cible prioritaire #1, bien qu'elle ait été configurée (handoff) en second.
3.08 | Handoff | TGP | Hand-off Complete, emport #4 et #6
Au bas du TGP, on peut distinguer le statut «C» au dessus des emports #4 et #6, ce qui signifie que les coordonnées des cibles ont été adéquatement transmises aux missiles de ces deux emports. La procédure HANDOFF est donc complétée avec succès!
À partir de maintenant, puisque nos missiles ont obtenu les coordonnées de nos deux cibles (Le RADAR SSR et la tour de contrôle), nous n'avons plus à faire de TMP Up ou quoique ce soit sur le TGP ou le WPN pour effectuer un tir.
Il nous faudra seulement respecter les conditions de tir que nous allons voir à la prochaine étape.
Donc, on ne doit plus toucher au TMS à moins de vouloir annuler les coordonnées d'une cible et de recommencer le HANDOFF pour un emport précis.
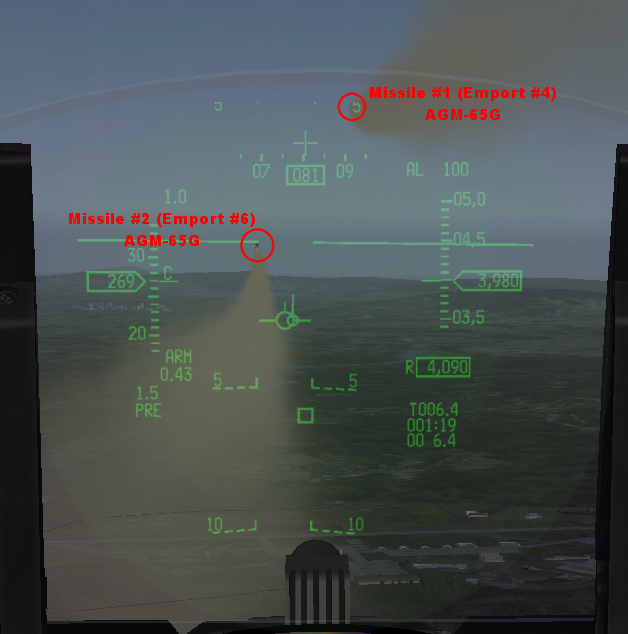
3.09 | Handoff | Validation #1 et #2 via le HUD
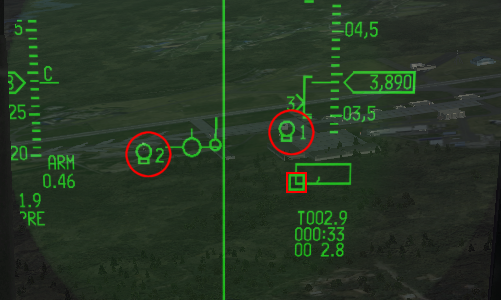
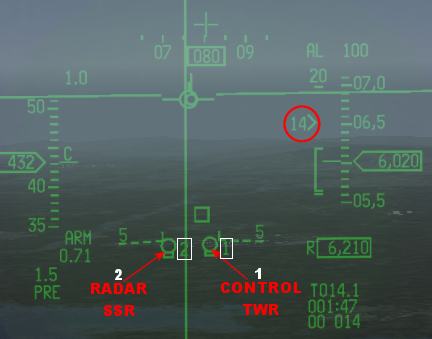
Sur l'illustration de gauche (HUD), on peut distinguer que le pilote a déplacer légèrement le curseur après avoir complété sa procédure HANDOFF et le «TD Box» ayant bougé quelque peu, on peut maintenant discerner nos deux cibles prioritaires désignées affichées clairement dans le HUD avec la mention #1 et #2.
Sur l'illustration de droite (WPN), on peut distinguer que le caret du «MLE» correspond à l'information du HUD, soit moins de 5nm de portée de tir pour le missile de l'emport #6.
Note: Il n'est pas nécessaire de bouger le SPI avant de faire feu. On peut bouger légèrement le SPI simplement pour déplacer la boîte de tir (TD Box) afin de valider que nos deux cibles prioritaires sont bien affichées dans le HUD avec les libellés des petits cercles 1 et 2. Lorsque les deux petits cercles avec un petit rectangle en dessous identifiés #1 et #2 sont présents et qu'ils correspondent bien aux cibles que nous avions verrouillées, alors tout a bien fonctionner avec le HANDOFF.
De toutes façons, on sais maintenant que nos missiles ont déjà les coordonnées précises de chaque cible #1 et #2 en mémoire. Il n'est donc plus nécessaire de conserver le SPI sur l'une de nos cibles puisqu'il suffira de sélectionner l'emport voulu au moment opportun.
Il faut savoir que la dernière cible sélectionnée lors de notre dernière procédure «HAND-OFF» devient automatiquement la cible prioritaire #1. L'autre qui avait été désignée précédemment (Radar SSR) devient automatiquement la cible prioritaire #2
Si on veut changer l'ordre des priorité de tir 1 vs 2, on peut utiliser le bouton MSL STEP du flight stick qui sélectionnera l'autre emport et alternera les priorité de tir. Le TD Box se déplacera automatiquement sur la position qui avait préalablement été enregistrée en mémoire lors du HANDOFF.
Le bouton MSL STEP est également une bonne manière de voir si nos deux cibles enregistrées précédemment lors des HANDOFF sont bel et bien à deux endroits différents.
Il faut finalement savoir que le pilote doit choisir deux cibles qui ne sont pas situées trop près l'une de l'autre, car lors du tir, le premier Maverick pourrait causer des problèmes au second missile situé quelques secondes derrière. Assurez-vous que vos deux cibles ne soient pas adjacentes l'une de l'autre.
Aussi, sachez que les missiles Maverick ne sont pas très rapide. Votre avion pourraît ainsi aller plus rapidement que vos missiles et l'impact auraît lieu derrière vous.
![]() Maintenant que la procédure HANDOFF est complétée, consultez la prochaine étape TIR DES MISSILES, disponible disponible via l'onglet situé en haut de cette page.
Maintenant que la procédure HANDOFF est complétée, consultez la prochaine étape TIR DES MISSILES, disponible disponible via l'onglet situé en haut de cette page.
Tir des missiles en mode PRE
4.00 | WPN | Paramètres de tir AGM-65
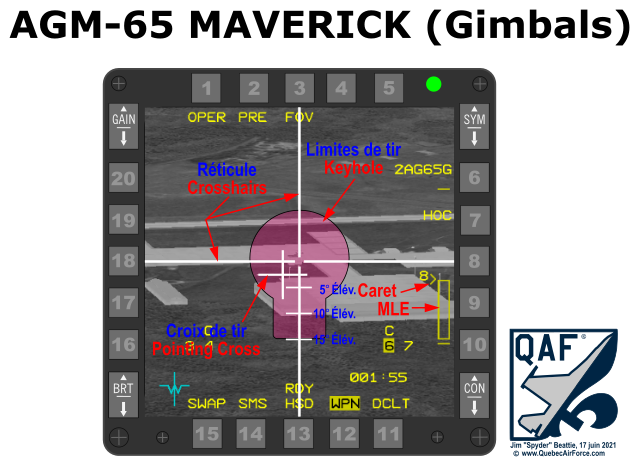
Les limites de tir du Maverick et le trou de serrure (keyhole) imaginaire.
Lorsque la croix de tir clignote, vous n'êtes plus à l'intérieur des limites de tir. La croix de tir doit demeurer stable sans clignoter avant de faire feu.
Autres limites à respecter:
- Vitesse < Mach 1.2.
- Bank angle: < 30° maximum;
- Taux de rouli (Roll rate): Max 30° par seconde;
- Angle de descente (dive angle) maximal: 30°;
- Les cardans (Gimbals) du missile Maverick sont: 10° en azimuth et 15° en élévation;
- Maximum load factor = 3G; Minimum Load factor = 0.5G;
- MLE (Missile Lauch Enveloppe): Le caret doit être situé à l'intérieur de la zone MLE (8nm sur cette illustration).
4.01 | Launch | Paramètres de tir en rafale
Au bas du TGP, on peut distinguer le statut «C» (Completed) au dessus des emports #4 et #6, ce qui signifie que la procédure 3 du «HANDOFF» avait bien été complétée ce qui confirme que des coordonnées de cibles ont été préalablement transmises aux missiles AGM-65G situés sur ces deux emports. La procédure «HANDOFF est donc complétée avec succès!
Puisque nos missiles ont déjà en mémoires les positions exactes du Radar SSR et de la tour de contrôle, nous sommes presque prêts à faire feu immédiatement lorsque les paramètres de tir seront respectées (MLE, Keyhole). Donc, on ne doit plus toucher au TGP ou au TMS à moins de vouloir annuler les coordonnées d'une cible et de recommencer le HANDOFF pour un emport précis.
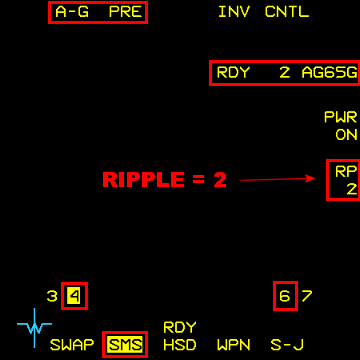
Puisque nos deux cibles sont situées assez près l'une de l'autre pour ne pas avoir besoin de changer le cap de notre avion tout en respectant les paramètres de tir, nous avons donc le luxe de pouvoir inscrire un RP (Ripple) de 2 dans la page SMS du AGM-65G.
Ceci permettra au pilote de cliquer une seule fois sur le bouton «Pickle» et de le maintenir quelques secondes pour que les deux missiles puissent être tirés de manière quasi simultané.
Si la distance entre les deux cibles étaient de plus de 10° d'azimuth ou que l'une des deux cibles devait se situer beaucoup plus loin, on ne pourraît pas utiliser un tir en mode «Ripple 2» car nous ne respecterions pas les paramètres de tir pour la seconde cible (MLE hors zone ou Keyhole azimuth > 10°, etc).
Dans ce cas précis, laissez le RP à 1 afin qu'un seul missile soit lancé avec le bouton «Pickle Release». Le pilote devra repositionner le nez de son avion lorsque les paramètres de tir pour la seconde cible seront respectés et il devra appuyez le bouton «Pickle Release» une seconde fois pour sa seconde cible.
4.02 | Tir des missiles AGM-65G en rafale

Bien que la caméra du TGP et celle du Maverick peuvent-être bien positionnée sur votre cible, cela ne signifie pas que le nez de votre avion soit en ligne avec votre cible. On ne doit jamais oublier de regarder le HUD avant de faire feu afin de s'assurer que vous n'êtes pas en dehors des limites de l'angle de descente (dive angle) ou que votre taux de rouli soit de plus de 30 degrés, etc.
Une dernière vérification de la page WPN afin de s'assurer que vous respectez la zone du trou de la serrure (Key hole) et surtout assurez-vous que votre croix de tir (Pointing cross) ne clignote pas.
Note: Pour faire feu, souvenez-vous que vous ne devez pas désigner à nouveau une quelconque cible via «TMS Up», puisque cela a déjà été fait lors de la procédure HANDOFF...
Tous les paramètres sont OK, le Master ARM à bien sur la position ARM dans le HUD, alors prêt à faire feu. Appuyez et maintenez le bouton Pickle Release du «flight stick» pour au moins une seconde afin de procéder au lancement des missiles.
4.03 | Deux missiles en route
Les deux missiles sont en route vers leur cible respectives.
Vous pouvez appuyer les touches Shift 7 plus d'une fois pour suivre l'un ou l'autre des missile en direction vers leur cible.
Si vous touchez les deux cibles, c'est réussi, vous obtiendrai immédiatement cent (100) points qui seront affichés à l'écran. Félicitations!
Tir des missiles en mode VIS
LANCEMENT ou TIR DES MISSILES en mode VIS
TIR DES MISSILES EN MODE VIS: textes à venir...
TIR DES MISSILES EN MODE VIS: textes à venir...
LES DÉTAILS DU LANCEMENT DES MISSILES EN MODE VIS SERONT AJOUTÉS ICI PROCHAINEMENT... (TRAVAUX EN COURS!)
Références
Autres références de lecture
Préparatifs et lecture additionnelle:
Lire ces manuels présents dans votre dossier [C:]\Falcon BMS 4.35\Docs\
- BMS Training Manual.pdf, MISSION #13: AGM-65 MAVERICK, page 120.
- BMS Training Manual.pdf, MISSION #14: AGM-65 MAVERICK (CAVOK), page 131.
- BMS Dash-34-1-1 Manual.pdf, AGM-65D/G MAVERICK MISSILE, pages 176 à 199.
- Weapons Checklists.pdf, AGM-65 MAVERICK, pages 6 à 8.
- Video «AGM-65 Maverick Quick Boresighting», Tutorial #25
Auteur, traduction et maj
Auteurs, traduction et màj
Auteur: Jim «Spyder» Beattie.

MISE À JOUR:
La dernière mise à jour de cette page web a été effectuée le 2021-06-27 à 10h41 (CANADA HNE, UTC-4).